Variational Auto-Encoders
2023-08-01Deriving ELBO
The goal of a VAE is to learn a latent representation of the data. We do this by mapping the data to a compressed representation, and then reconstructing the data from the compressed representation. An encoder (usually a neural net) q takes a datapoint x as input and outputs the mean \mu and variance \sigma of a Gaussian distribution from which the latent z is sampled. The decoder then reconstructs the data from the latent z.
VAEs were introduced in [1] by Kingma et al. Their input distribution consists of binary values instead of real values, and the goal is to maximize the likelihood of the data for generation. Suppose we sampled z from a distribution and then the data x from a distribution conditioned on z. The likelihood of the data is then
p(x) = \int p(x|z)p(z) \, dz
Maximizing this likelihood using gradient descent is however intractable, so we instead find a lower bound for the likelihood and maximize that. Specifically, we find a lower bound for the log likelihood, which is equivalent. Recall from Bayes’ theorem that
p(x|z) = \frac{p(z|x)p(x)}{p(z)}
Now we write the log prob as an expectation over z, which lets us do some simplification
\begin{aligned} \log p(x) &= \mathbb{E}_{z \sim q(z|x)} [\log p(x)] \\ &= \mathbb{E}_{z \sim q(z|x)} \left[ \log \frac{p(x|z)p(z)}{p(z|x)} \frac{q(z|x)}{q(z|x)} \right] \\ &= \mathbb{E}_{z \sim q(z|x)} [\log p(x|z)] - D_{KL}(q(z|x) \| p(z)) + D_{KL}(q(z|x) \| p(z|x)) \end{aligned}
Note that the last KL divergence term is intractable because it contains p(z|x), which is not easy to compute. But since KL divergence is always greater than or equal to zero, we can remove the term and arrive at the lower bound for the log likelihood
\log p(x) \geq \mathbb{E}_{z \sim q(z|x)} [\log p(x|z)] - D_{KL}(q(z|x) \| p(z))
which is called the Evidence Lower Bound (ELBO) or the variational lower bound.
Closed-form loss for Gaussian prior
In this case, p(z) = \mathcal{N}(0, I), q (the encoder) will be parametrized by \phi, so it’ll be q_\phi(z|x), and the decoder will be parametrized by \theta, so it’ll be p_\theta(x|z). Let’s consider the KL divergence term first
D_{KL}(q_\phi(z|x) \| p(z)) = \int q_\phi(z|x) \log \frac{q_\phi(z|x)}{p(z)} \, dz
Our probability distributions are Gaussians. Given x, the encoder will predict the mean \mu and variance \sigma^2, so
q_\phi(z|x) = \mathcal{N}(z | \mu, \sigma^2) = \frac{1}{\sqrt{2\pi\sigma^2}} \exp\left(-\frac{(z - \mu)^2}{2\sigma^2}\right)
Skipping the long derivation [2] here, but the KL divergence simplifies to
D_{KL}(q_\phi(z|x) \| p(z)) = -\frac{1}{2} \sum_{j=1}^J \left(1 + \log \sigma_j^2 - \mu_j^2 - \sigma_j^2\right)
where j is the mean and variance vector index and J is the dimension of the latent. The loss (negative ELBO) is
\mathcal{L}(\theta, \phi) = \frac{1}{L} \sum_{l=1}^L \sum_{k=1}^K \left(\log \sigma_k + \frac{(x_{l,k} - \mu_k)^2}{2\sigma_k^2}\right) - \frac{1}{2} \sum_{j=1}^J \left(1 + \log \sigma_j^2 - \mu_j^2 - \sigma_j^2\right)
and this is the loss for a single data point. As we can see, the reconstruction loss looks like mean squared error for a Gaussian distribution. We can use other losses as well. If the data is say, normalized images, we can use binary cross-entropy loss instead.
Implementation
Colab notebook here. We’ll use MNIST. A simple MLP for the encoder and decoder suffices. The encoder outputs the log variance instead of the variance itself, because exponentiating the log variance ensures it’s always positive. Let’s define the VAE class:
class VAE(nn.Module):
def __init__(self, zdim):
super().__init__()
self.zdim = zdim
self.encoder = nn.Sequential(
nn.Linear(784, 256),
nn.ELU(),
nn.Linear(256, 64),
nn.ELU(),
nn.Linear(64, 32),
nn.ELU(),
nn.Linear(32, 2 * zdim)
)
self.decoder = nn.Sequential(
nn.Linear(zdim, 32),
nn.Linear(32, 64),
nn.ELU(),
nn.Linear(64, 256),
nn.ELU(),
nn.Linear(256, 784),
nn.Sigmoid()
)This has around 440k parameters. We’ve used ELU because
ReLU can cause dead neurons. Since we’re using
Sigmoid in the output layer, we’ll use binary cross-entropy
loss as the reconstruction loss instead of the MSE loss we derived
above. We define the forward pass, where we use the reparametrization
trick.
def forward(self, x):
mu, logvar = torch.split(self.encoder(x), self.zdim, dim=1)
std = (logvar * 0.5).exp()
# reparametrization trick
z = std * torch.randn(mu.shape).to(mu.device) + mu
return self.decoder(z), mu, std, logvarWhy do we use the reparametrization trick? So our network is differentiable. Remember that sampling is not a differentiable operation, so we make use of the fact that c\sigma(x) = \sigma(cx) and c\mathbb{E}[x] = \mathbb{E}[cx] to make the sampling operation differentiable. Now we define the loss function.
def loss(self, x):
rx, mu, std, logvar = self(x)
gll = F.binary_cross_entropy(rx, x, reduction='sum')
kld = -0.5 * (1 + logvar - mu * mu - std * std).sum()
return gll + kldThe training loop is straightforward:
device = torch.device('cuda')
batch_size = 128
epochs = 50
lr = 3e-4
zdim = 2
transform = transforms.Compose([
transforms.ToTensor(),
transforms.Lambda(lambda x: torch.flatten(x))
])
def train(model, batch_size, lr, epochs):
loader = torch.utils.data.DataLoader(
MNIST('.', download=True, transform=transform),
batch_size=batch_size,
shuffle=True
)
opt = torch.optim.Adam(model.parameters(), lr=lr)
for epoch in range(1, epochs + 1):
bar = tqdm(loader, ascii=' >=')
for x, _ in bar:
opt.zero_grad()
loss = model.loss(x.to(device))
loss.backward()
opt.step()
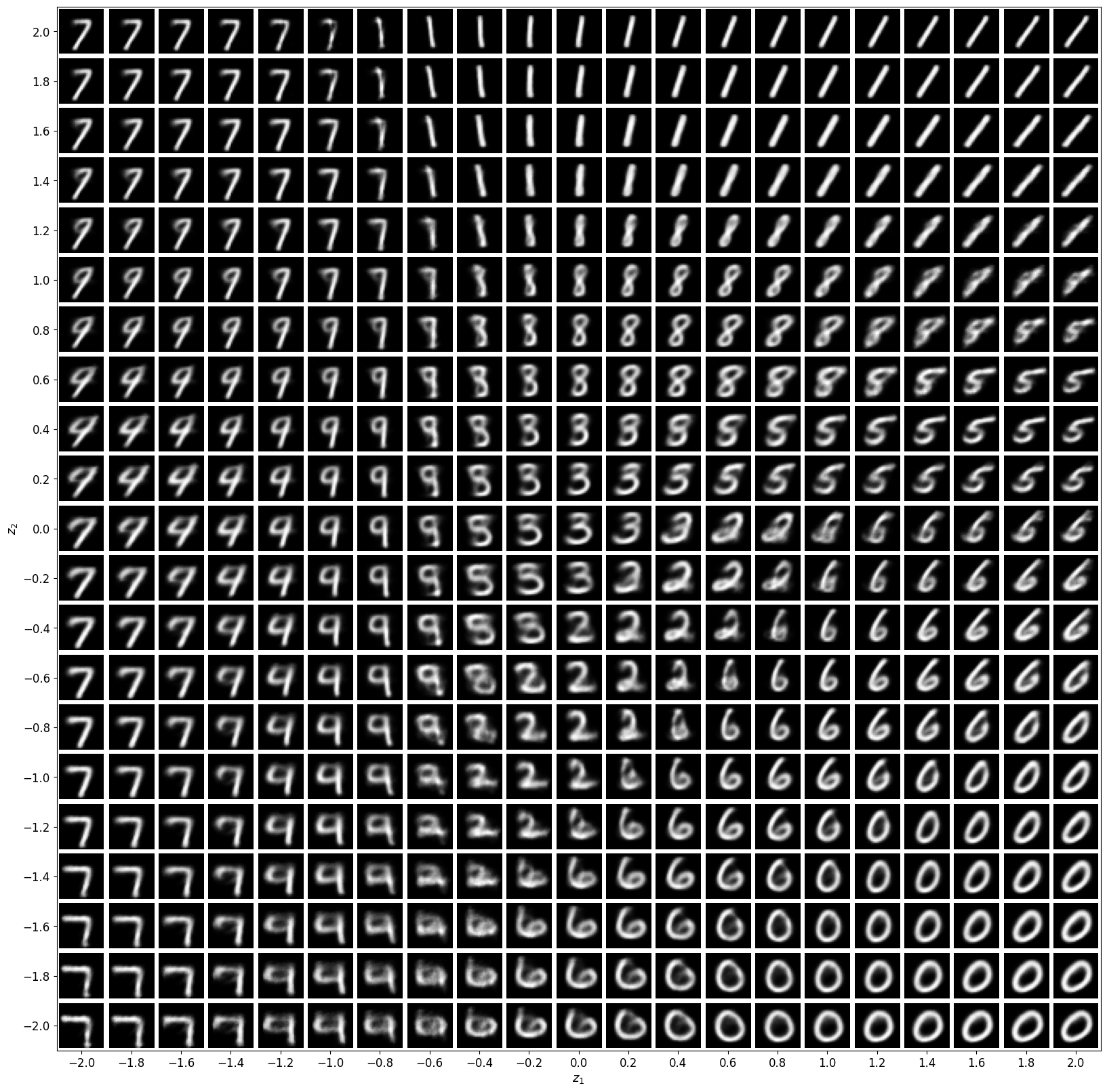
bar.set_postfix({'loss': f'{loss.item():.6f}'})We chose a zdim of 2 so that we can visualize the latent
space easily because every decoder output corresponds to a point in
\mathbb{R}^2. Visualizing decoder
output for latent vectors in [-2, 2]^2
gives us this: